gripper
purpose
This project focused on developing a proof-of-concept gripper for home robotics applications. I took ownership of the project during the final design, prototyping, and validation phase, evaluating the design to determine whether it met the intended functional requirements and performance goals.
design
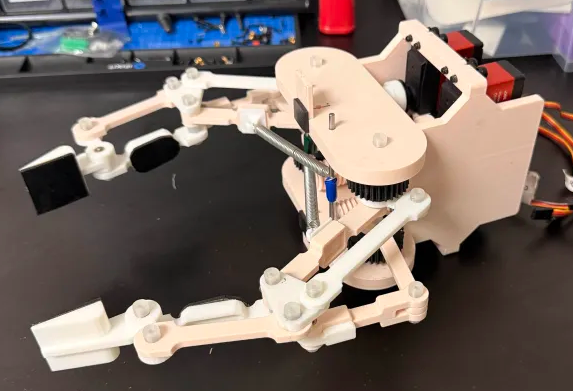
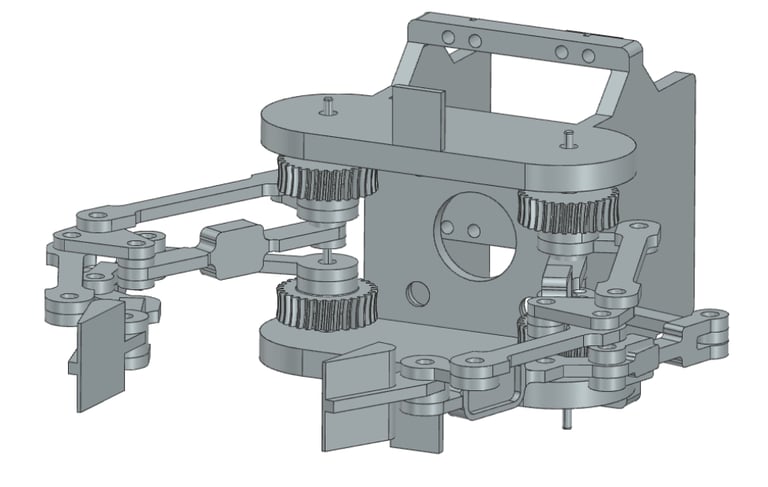
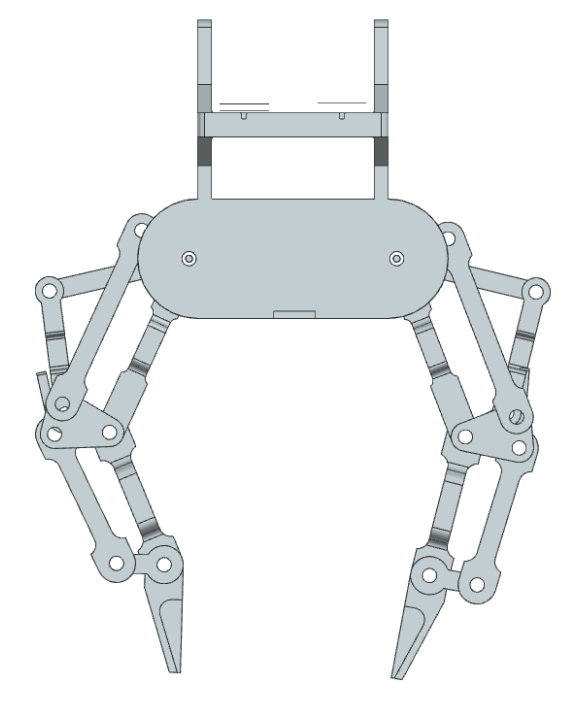
A 2 finger underactuated adaptive gripper powered by servos. Featuring 3 degrees of freedom, the jaws wrap wround objects within its grasp, allowing the gripper to hold uneven shapes.
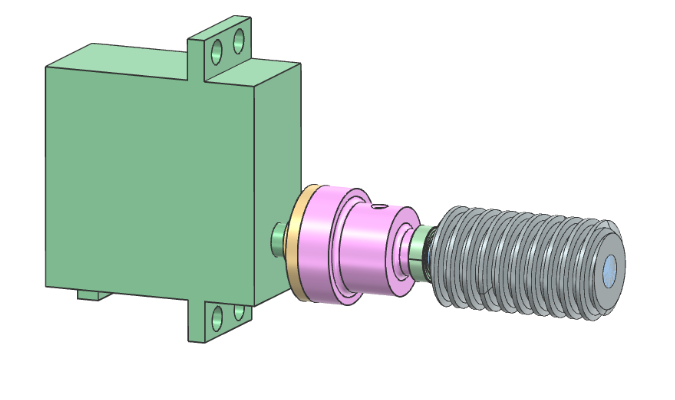
My design changes focused on reducing linkage mass through selective hollowing and thinning while maintaining structural strength, validated through FEA. I adapted the linkages to accommodate bushings, shafts, and end caps, and designed a housing to integrate the servos, shafts, and gear train into a cohesive assembly.
testing & validation
3D printed and assembled a functional prototype, developed test plans, and validated the design’s range of motion and functionality. The gripper was tested on a variety of object form factors, including cubes, cylinders, flat cards, angled cards, and objects with irregular centers of mass, with loads up to 5 lbf.
functional requirement
Design a gripper capable of securely grasping a wide range of objects, from heavy, irregular geometries to thin, fragile forms.